
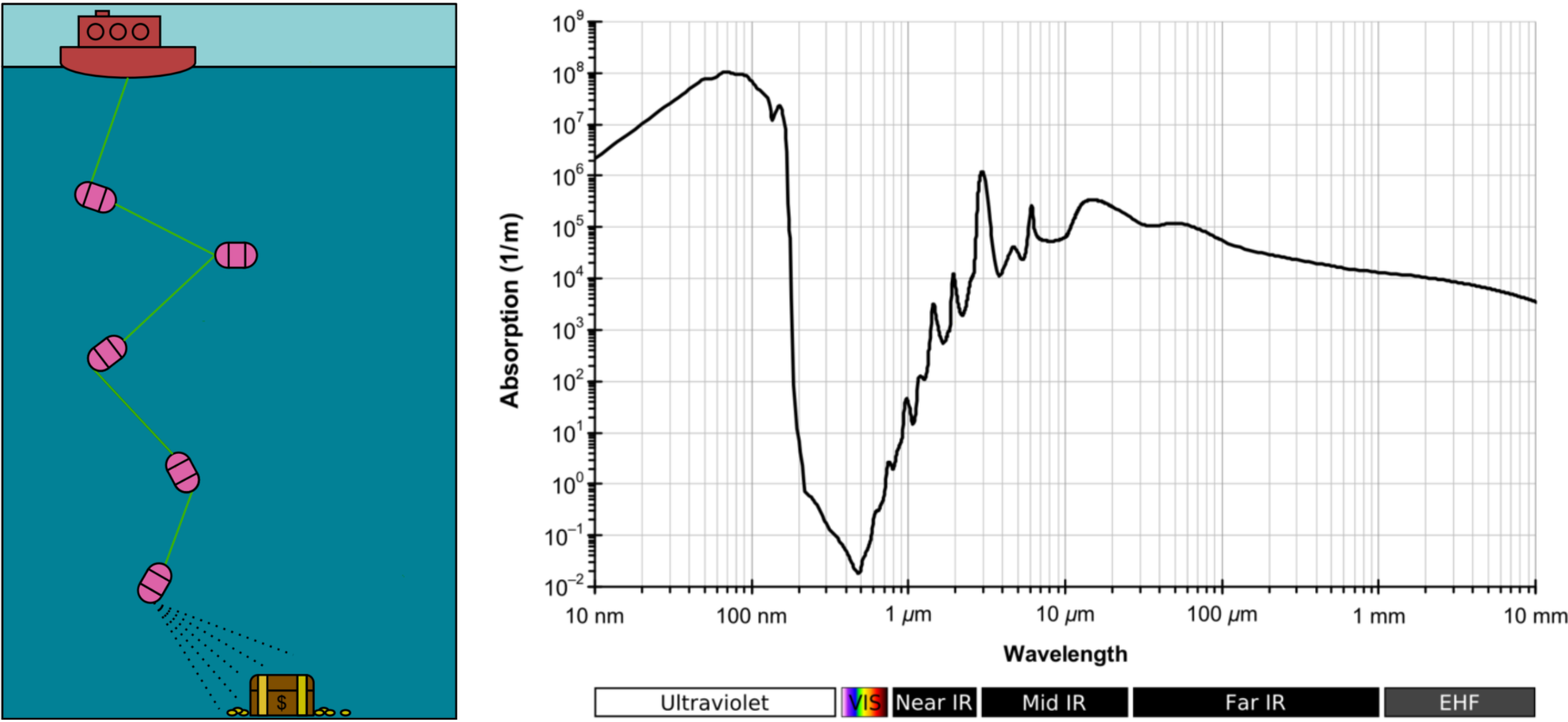
Thanks to current optical communication technology, we’ve been able to map planets light years away at much higher resolution than most of our oceans on Earth. That’s because sonar, a traditional underwater communication method, hasn’t been drastically improved for decades. Radio frequency (RF) communication is limited heavily by signal attenuation (or scattering) in seawater, resulting in low bandwidth communication over short distances. This inhibits deep sea exploration, limiting our understanding of the geography and biology of our oceans.
As a part of UC Berkeley’s Theoretical & Applied Fluid Dynamics Laboratory (TAF Lab), my graduate capstone group and I set out to design and build a swarm of optically communicating unmanned underwater vehicles (UUVs). The goal was to build these as a platform for low cost, high bandwidth means of underwater wireless networking, for the sake of improving underwater exploration.
For the scope of our project, we were interested in establishing a wireless link between two modules in order to achieve video streaming underwater.
By modulating lasers at high frequencies and using advanced control methods, we aimed to transmit data across large stretches of open ocean orders of magnitude faster than traditional methods. We also aimed to integrate optical components into a working UUV prototype for limited underwater communication testing.
By rapidly modulating lasers at megahertz frequencies, the range and density of data transmitted underwater can be drastically increased, realtive to their sonar counterparts.
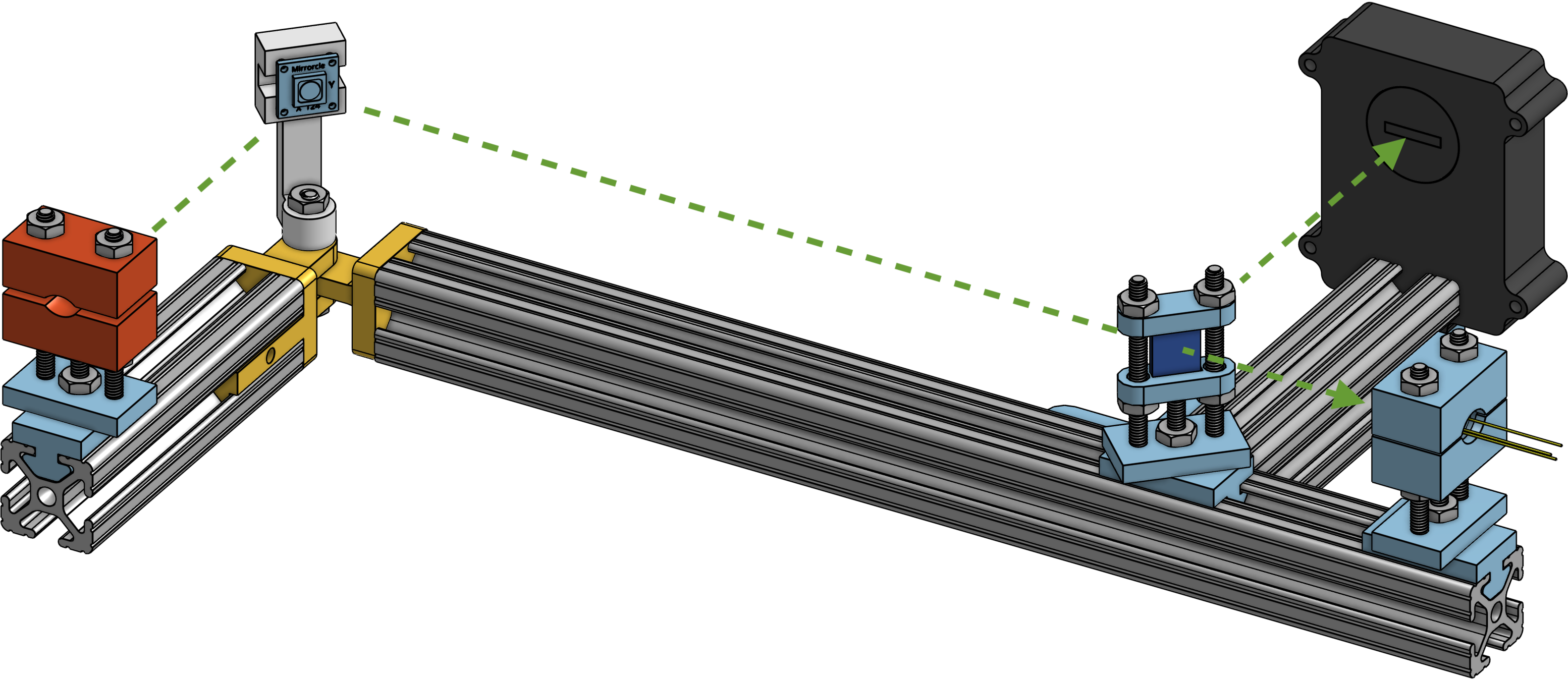
We designed a configuration of optical components that would encode laser signals with the help of a PCBA, that would then be reflected off of and thus controlled by a MEMS-driven mirror device (Mirrorcle Inc). The transmitted signal would pass across free space into a second UUV (shown on the right half of Figure 3) to be focused and split by a convex lens and beam splitter. The receiving UUV would use a photodiode to decode the incoming signal and a position-sensitive detector (PSD) to record the position of the signal as feedback for the transmitting UUVs’ mirror driver. Together, the two nodes would form a closed loop system capable of high speed tracking and duplex communication.

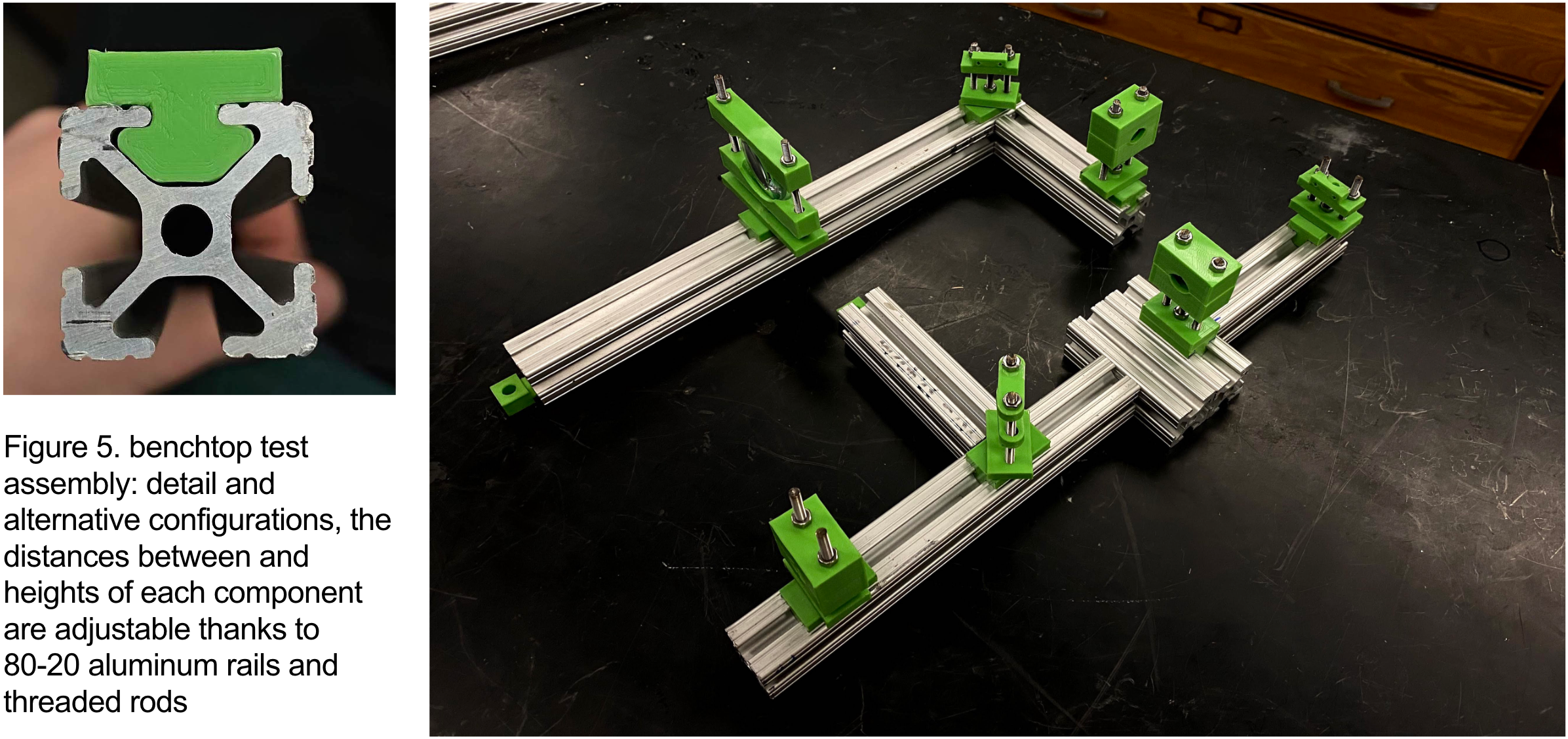
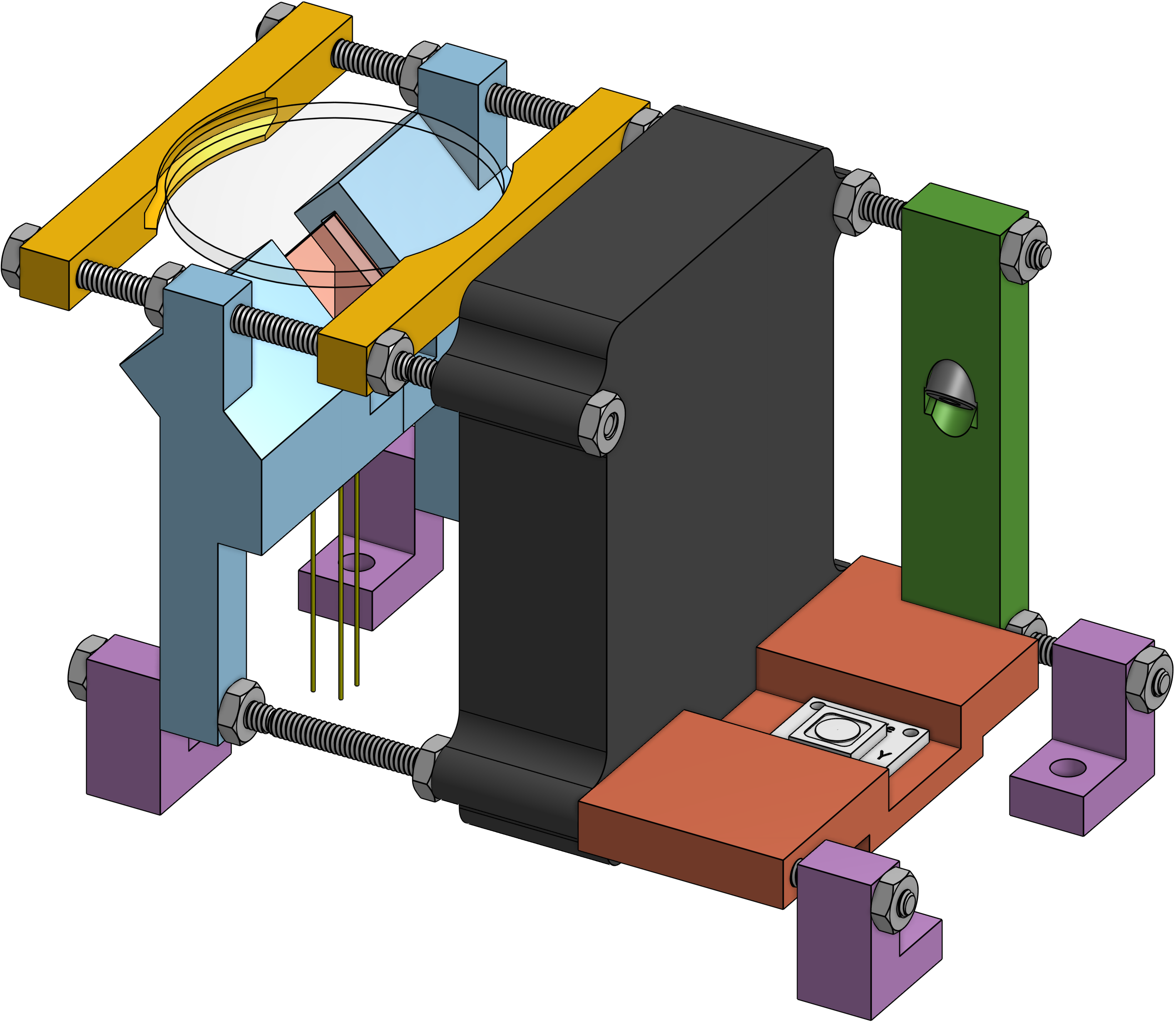
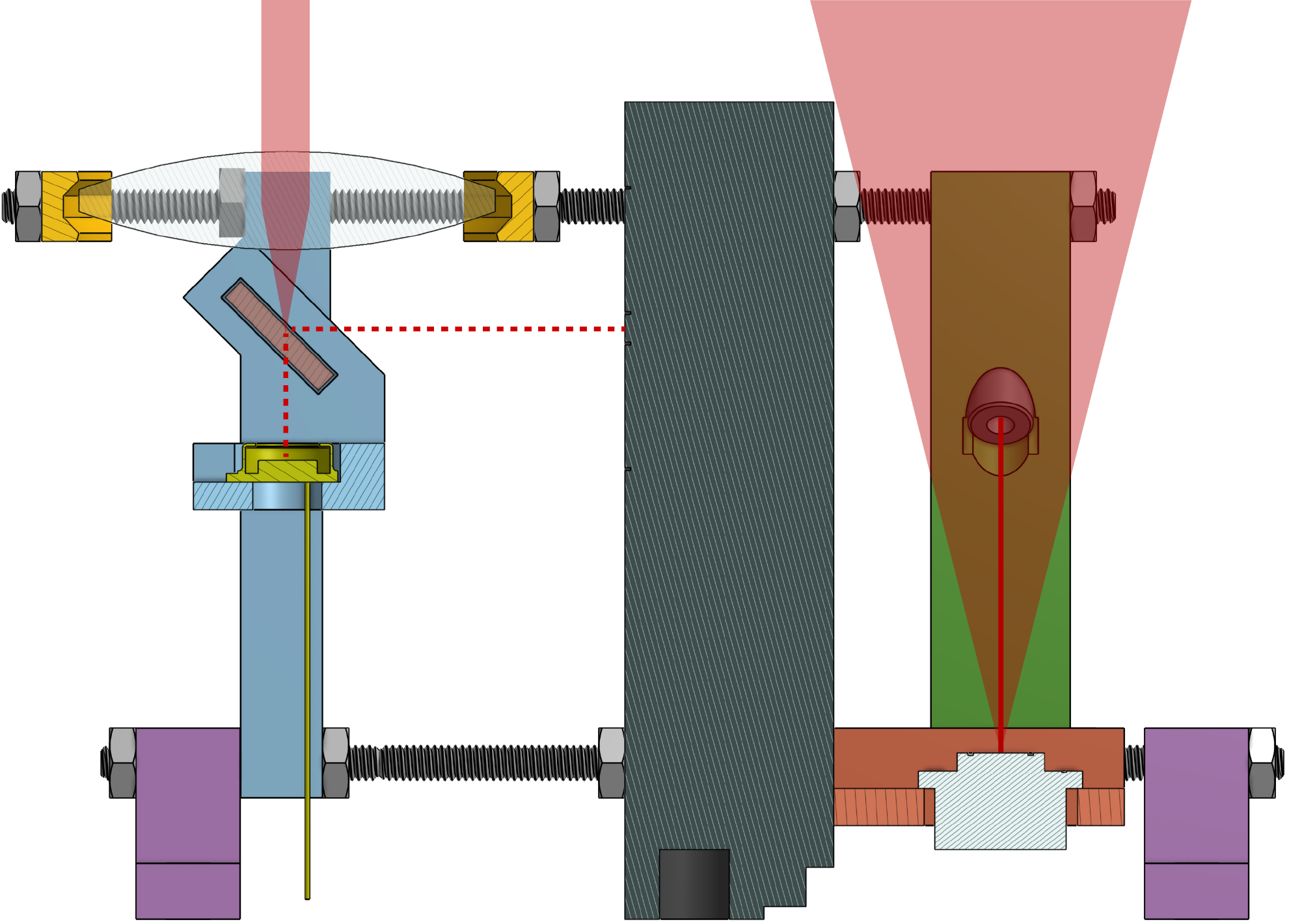
In order to validate tracking and data transfer on the bench-top, I designed a modular test assembly to house various optical components. The laser source discussed above is held in place in the red adjustable jaws (Figure 4) and the signal is reflected about the MEMS mirror held by the white mount. The signal is then split by the dark blue beam splitter and read by the photodiode and PSD (black). I designed the yellow hinge to allow the laser to be moved away from dead-center on the PSD, prompting the MEMS-mirror to steer the laser signal back to its original position. With this test assembly built, our closed loop control algorithm allowed the mirror to continuously correct for deviations in the laser’s position while maintaining communication between it and the photodiode. This validated our ability to communicate at high speed across free space.
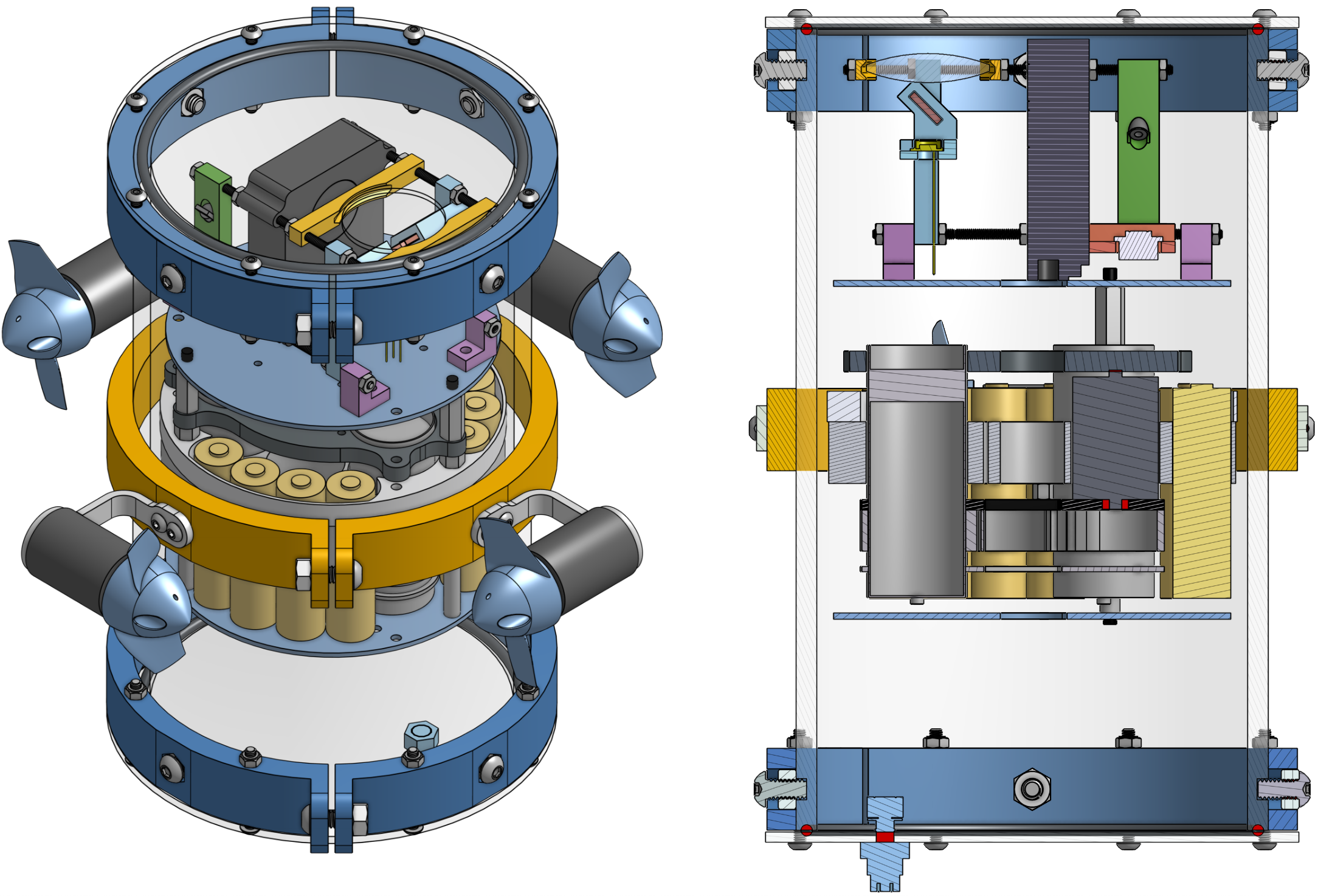
Having devised a way to communicate underwater, it then came time to design a communication module to fit within a small underwater vehicle, alongside motors, pumps, batteries, etc. The design I created is centered around the PSD (Figure 6, shown in black) and takes advantage of rods to hold the various optical components in vertical alignment with each other. The rods also allow for lenses of various sizes to be used to focus incoming signals about the beam splitter for more robust communication.
I designed the communication assembly to sit in the upper third of the CalSat UUV, in order to send and receive information across the flat acrylic plate of the device’s enclosure. Below the communication assembly, an array of Li-ion batteries power the device’s motors, in charge of lateral motion underwater, as well at the peristaltic pumps, in charge of the device’s vertical motion. In the remaining volume below the pumps and motors, I intended for the communication modules driver boards and microcomputers (Raspberry Pi) to be housed. The enclosure was designed with no glued interfaces (which have been observed to leak over time in previous enclosure iterations), and relies on a seal created between the flat acrylic panels, the blue collars at either end, and the o-rings between them. As the UUV descends deeper underwater, the pressure acting on the outside of the enclosure will push these components together and strengthen the watertight seal keeping the electrical components safe.
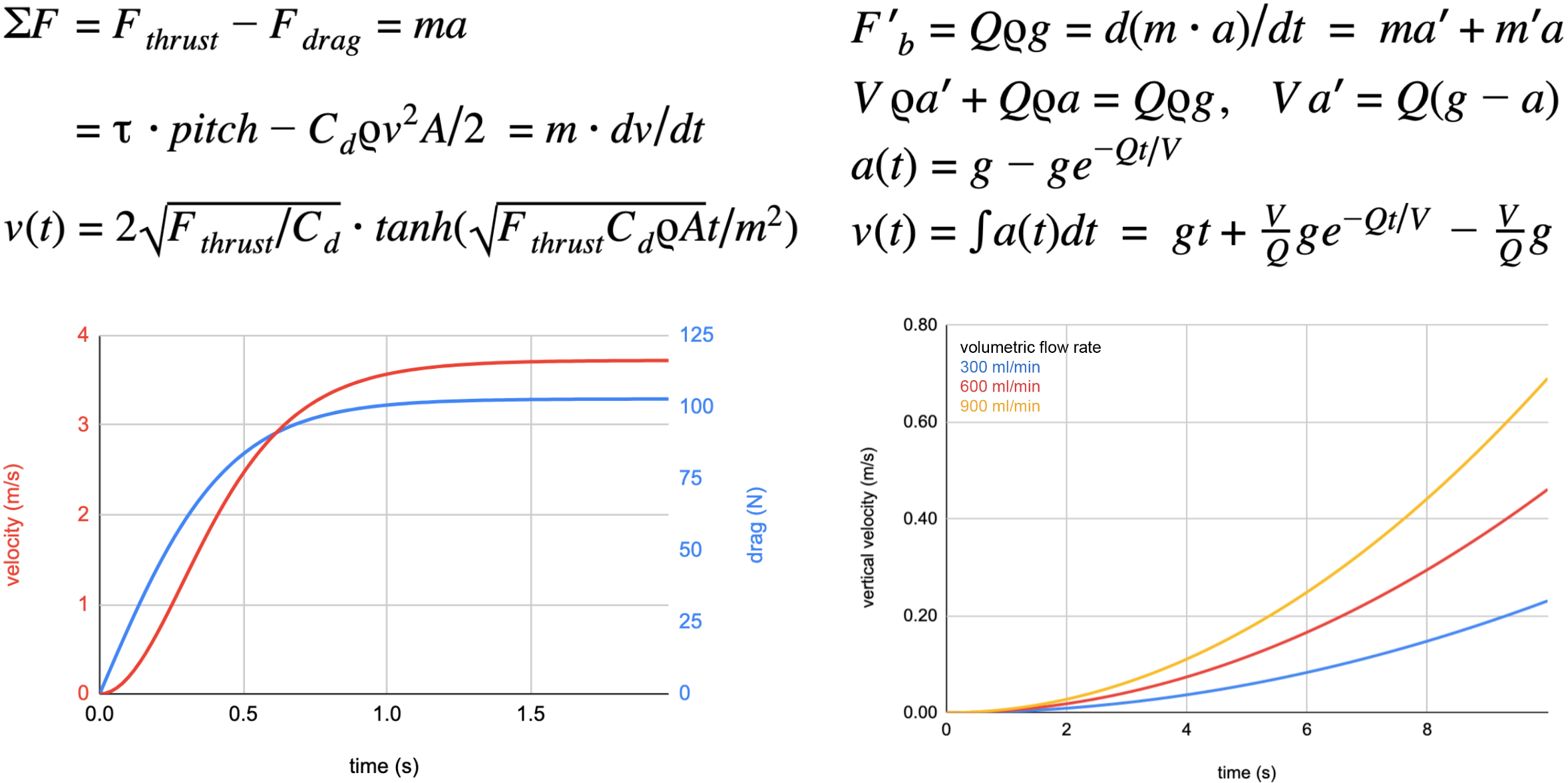
When designing various external components such as the metal brackets that hold the motors to the UUV’s enclosure, it was important to get a sense of the devices motion characteristics, both laterally and vertically. With few of the UUV’s physical characteristics, I was able to determine the forces acting it, as well as its resulting acceleration and velocity curves. As it moves laterally in any given direction, the UUV is meant to be powered by two motors powered in the same direction. The UUV accelerates until the drag force it feels is equal to the thrust force provided by its motors. In order to move vertically, a set of three peristaltic pumps moves water in and out of three internal reservoirs, effectively changing the device’s buoyancy and creating an increasing force in the z-direction until the reservoirs are either completely filled or emptied.
For a more in-depth look at our group’s process, analyses, schematics, etc., take a look at the white paper we wrote for our lab. Also, check out the video we put together as a pitch for Berkeley’s Fung Institute end-of-year capstone showcase, where we virtually presented to hundreds of friends, professors, and colleagues.